

InfiPoint soverview
InfiPoints is a 3D laser scanning data processing platform at the forefront of the industry. It is developed jointly by experts from the United States and Japan in accordance with the needs of the industry. The purpose is to solve the data processing and application problems in the scanning industry, such as large data loading visualization, automatic processing and efficiency, scanning data sharing and engineering collaboration.
InfiPoints is a powerful point cloud data processing and application platform, with the advantages of large data, automation, one-stop and multi-platform. With the same computer configuration, InfiPoints can load and process the massive point cloud data of different scanning devices more efficiently, provide diversified splicing methods, perfect noise reduction and effective lightweight to optimize the quality of point cloud, quickly reconstruct the 3D model through a key extraction and modeling tool, and make use of point cloud data for comparative analysis and interference checking in engineering collaboration. Itcan output lightweight point cloud data, polygon geometry model, 2D/3D drawings, high-definition orthophoto image, roaming video, collision detection animation, data mosaic report, CAD comparison report, free browsing file, VR browsing file and 3D model supported by different software platforms. It can greatly improve the efficiency and application value of point cloud data processing, and the number of multi-platforms. Compatible and unrestricted data results make the application more convenient and wider.
Data size is unrestricted
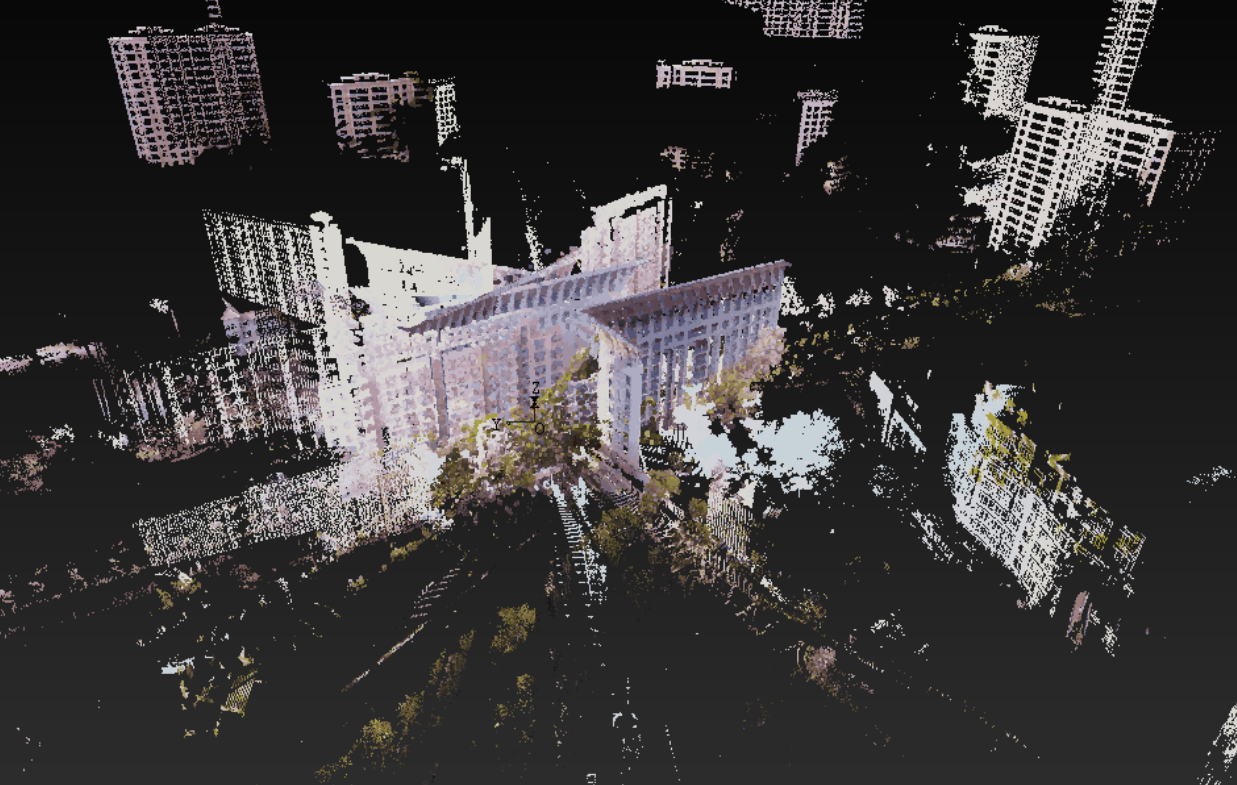
Innovative data indexing method enables display memory to quickly call physical memory data, and InfiPoints can handle unlimited point cloud data on the premise that the hardware configuration is high enough.
One-stop process
After importing the scanned data, data preprocessing, engineering analysis, and automatic extraction of geometric models to output results only need to be completed on the InfiPoints processing platform. It saves the time of data conversion, thus improving the efficiency of data processing.Different from the traditional work flow, which needs more than one software to complete the work and users not only need to learn more than one software, but also waste a lot of time in importing and exporting data. InfiPoints reduces the efficiency of data processing.

Unrestricted scanning hardware brands

Supporting data format
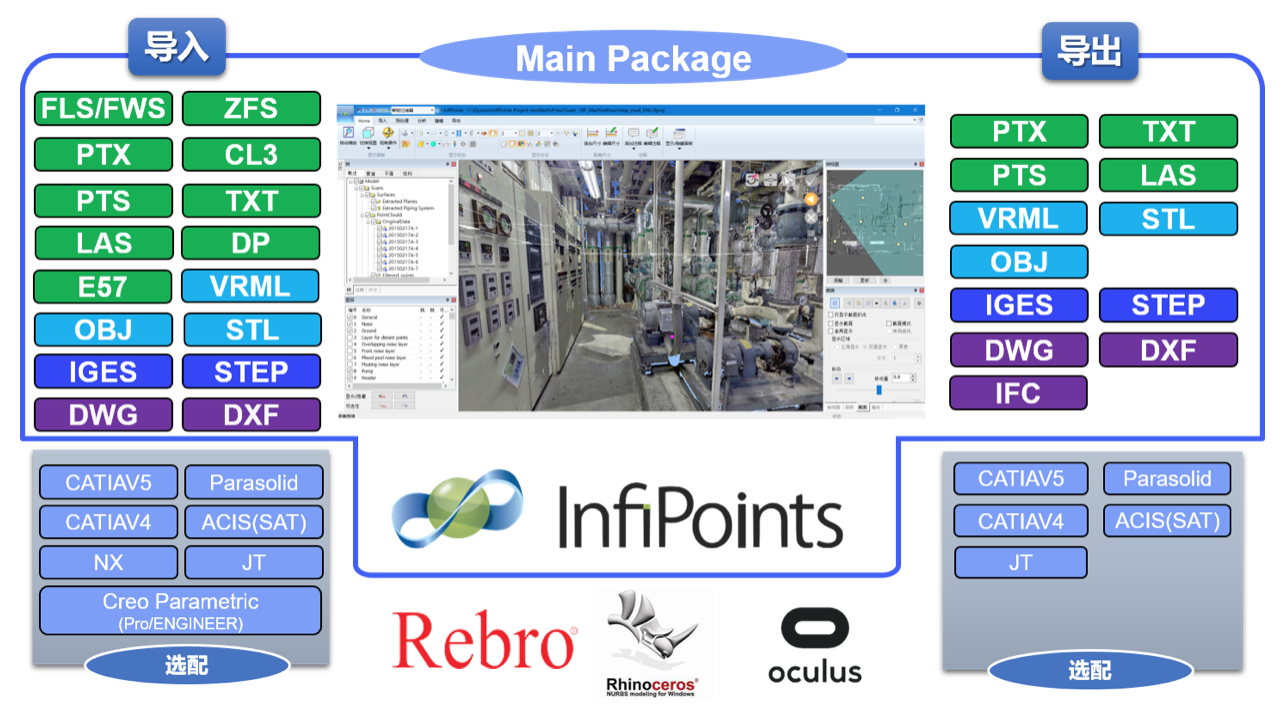
Five data processing processes of InfiPoints one-stop point cloud

Data import
Support the import of scanned data from various brands and model formats from different CAD/CAM/CAE platforms.
Data preprocessing
After importing the scanned data, automatic preprocessing is carried out, such as automatic scanned date stitching, automatic filtering of noise points, spatial coordinate conversion and other functions, to ensure the quality of scanned data for subsequent processing.
Automatic stitching: Support the use of target sphere, relative coordinates, overlapping surface of multiple stitching methods and advanced ICP algorithm to directly calculate the geometric relationship between point groups, output stitching reports.
Automatic noise reduction: Automatically calculates and optimizes the quality of point cloud data, and reduces the scanning data capacity.
 |
 |
 |
 |
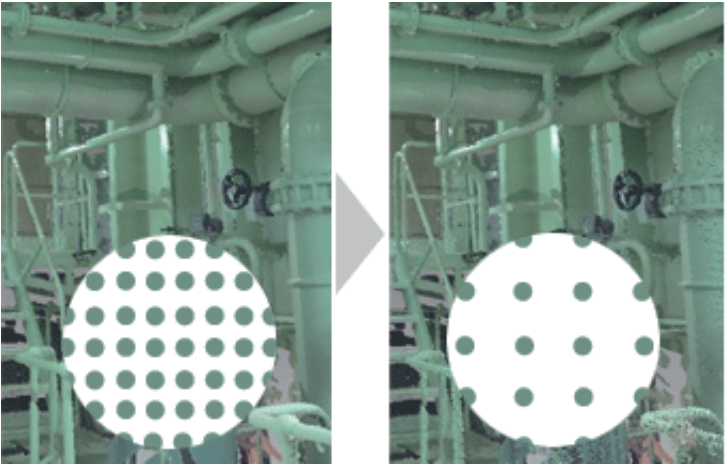
Scanning data lightweight: By setting the data point spacing and adding interpolation points, the data capacity can be reduced and the high quality visualization effect can be satisfied.
Engineering analysis
Geometric model adaptive fitting and 3D model comparison are carried out. Perform dynamic interference analysis between scanned data and CAD model.
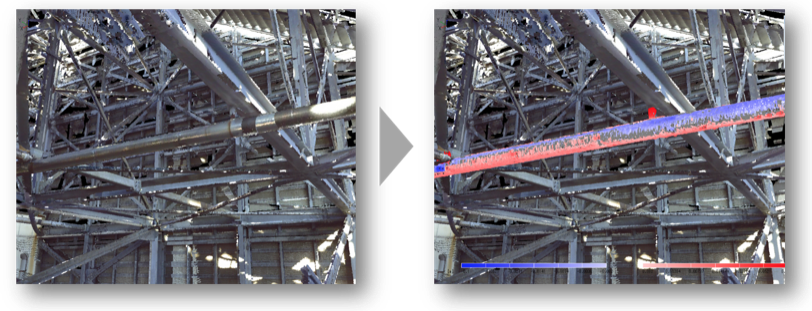
Model comparison: InfiPoints can automatically fit the CAD model with the scanning point cloud, directly calculate the error between the CAD model and the scanning point cloud, and show the error distribution trend and error value with the color cloud chart.
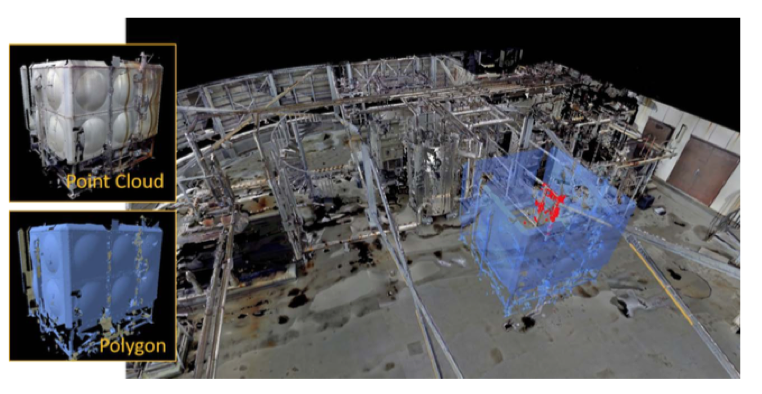
Dynamic collision analysis: The CAD model imported into InfiPoints platform can pre-assemble the equipment, simulate the moving path, detect whether the collision interference occurs between the equipment model and the scanning point cloud, and visually understand the collision interference during the moving process by simulating the moving path video.
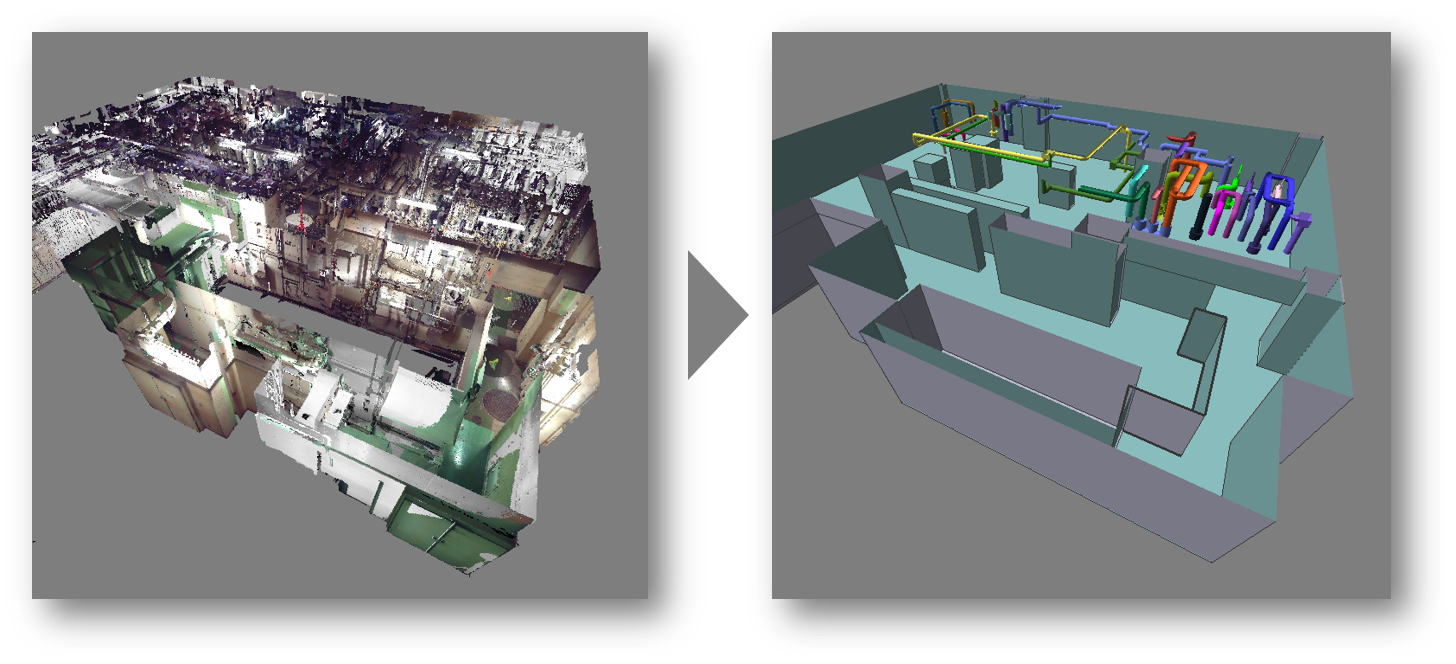
3D model
After scanning pretreatment, the regular geometric models, such as pipes, surfaces, structures and air ducts, are automatically extracted from the 3D scanning data and are standard attributes, and the 3D model is output by reverse modeling.
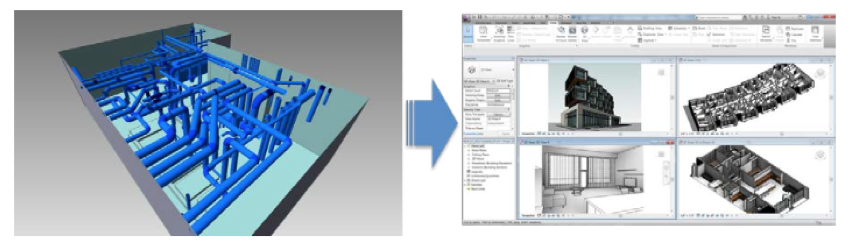
Diversified output
2D drawings: The automatically extracted model generates 2D line drawings according to cross-section or scanning data, and outputs Autodesk DXF or DWG drawings.
3D model:
Free browsing files: Viewer File can browse 3D point cloud and CAD model without installing software. It can perform point cloud classification, real-time measurement, 2D line drawing, output orthophoto and other operations, and improve the utilization and popularity of 3D scanning data.
Virtual Reality Browsing Files: Through virtual reality devices, scanning data can be directly browsed immersively, and multi-person collaborative discussions can be realized by combined Internet technology.

|
Minimum Requirement |
Recommendation |
|
|
CPU |
CPU capable of running OS listed below |
CPU capable of running OS listed below |
|
Memory |
16GB or more |
32GB or more |
|
OS |
Windows 7 Professional 64-bit SP1 |
Windows 10 64-bit |
|
Disk Device |
20GB or more, SSD is recommended |
500GB solid-state hard disk (meeting project file processing space) |
|
Graphic |
Graphic card supporting OpenGL |
Graphic card supporting OpenGL |
Below are the answers to frequently asked questions about InfiPoints.
General Use
Q. Can InfiPoints be used on multiple machines?
A. InfiPoints can be installed in multiple machines, but the number of sessions that can be executed simultaneously is limited by the number of licenses you have.
Q. I would like to check for the latest installers, relating manuals, and version-up information.
A. Please contact us.
Q. Can InfiPoints be used out of the office?
A. You can temporarily transfer the license to use InfiPoints outside of the server network. Please refer to the “Commuter License Guide”.
Q. I want to know more about the operation of InfiPoints.
A. Below is the information we have about InfiPoints operation.
Basic Operation Manual
Registration Information
Navigation (Navigation panel within InfiPoints)
Help (within InfiPoints. Open from the “?” button on the screen top right)
Q. I want to share point cloud data with partners and customers who do not have InfiPoints.
A. Create a viewer file. Project data can be viewed without an InfiPoints license. Refer to the operation manual for more details.
Contact your local reseller or Elysium for the operation manual.
Install
Q. I don’t know how to install InfiPoints.
A. You will need to install both InfiPoints and the license server program. You will normally install the license server to 1 machine.
Refer to the “InfiPoints Install Guide” (for installing InfiPoints) and/or “Quick Start Guide” (for installing the license server).
Contact your local reseller or Elysium for the documentation.
Data Import
Q. I would like to import multiple files at once.
A. Follow the steps below to import multiple files at once.
[Data Import] > [Point Cloud] > Import dialog
Select multiple files using the [Ctrl] key.
Select consecutive files (by selecting the starting file and the end file) using the [Shift] key.
Q. I would like to reduce the import time.
A. You can reduce the process time as below.
1. Increase the number of threads
Set the number of threads to the maximum physical number of cores of the machine
Select [Application button] > [System Preference] > [Miscellaneous] > [Number of used threads] to set the number of used threads.
* 8GB of memory is recommended per thread.
2. Increase memory
16GB or more memory is recommended for machines installing InfiPoints.
3. Use SSD as storage
Set “Work” folder and “Data” folder in an SSD drive.
Setting “Data” folder in an SSD drive is especially effective for accelerating the point cloud import process.
Q. I would like to directly import FARO scanner scans into InfiPoints
A. Import by drag-and-drop of the entire folder into InfiPoints.
** Do not change the folder name of the scanned data. This will result in failure of import.
Q. There is an error when I try importing fls files.
A. Below are some possible reasons.
1. Lacking workspace
When importing fls files, you may need around 10 times the file size of the fls files for the workspace.
Be sure to have enough free workspace in your drive.
2. The fls version is newer than what InfiPoints supports.
Turn on “Use the library installed in OS” (*) to import the fls files.
Make sure to have FARO SCENE or FARO SCENE LT (version supporting the specific fls file) installed in the same machine.
(*) Application Button > Import/Export Settings > fls > FARO LS
Data Export
Q. I would like to export planes and pipes as drawings created in InfiPoints.
A. You can export as DWG/DXF(3D).
Output Creation > Export > DWG/DXF(3D)
Display
Q. Point cloud is not shown in the view window.
A. The point cloud might be hidden. Please check the following settings.
Is the point cloud changed to “Show” in [Home] > [Display Settings] > [Show/Hide Point Cloud]
Is the Point Cloud part in the tree panel turned On?
If it is not yet solved, check below.
Make sure that the display range is not restricted by the clipping box or section.
Make sure that the [Display RGB] and/or [Display Intensity] set properly.
Make sure that any of the layers is not hidden in the layer panel.
Rsgistration
Q. I would like to know the operation for registration.
A. After importing the point cloud data, the Registration panel will be used. Refer to the operation manual for more details.
About point cloud import -> [3.1. Import Point Cloud]
About registration methods -> [4.2 Start Registration]
Q. I would like to align the X and Y axis direction to the building.
A. Use the Define the Origin command.
Refer to the operation manual for more details. ([4.8 Defining the Origin])
Contact your local reseller or Elysium for the operation manual.
Define origin
Q. Are there anything to be aware of when defining origin by selecting 2 points?
A. Make sure that there is enough distance between the 1st and 2nd points.
If the distance between two points are close, there can be deviation between the point cloud and the axis.
Generate Polygon
Q. I would like to export polygon models that can be used in CAD.
A.STL, OBJ, VRML are supported polygon model formats.
Create filtered points
Q. How does the filtered points appear in the structure tree?
A. If the filtered point cloud is created as 1 point cloud, “Filtered_points” will be created in the tree panel.
If filtered points are created for each scan, it will appear as “[scan data name] (Filtered)” in the tree panel.
Q. Does the project folder data size become smaller when the filtered point cloud is created?
A. Since the filtered point cloud is created in addition to the existing point cloud, the project folder data size will increase.
Even if the point cloud part is deleted from the structure tree, the point cloud data itself is not deleted.
The point cloud data is saved in the PointCloud folder within the project data folder.
Viewer File
Q. I would like to decrease the viewer file size.
A. Create the viewer file from the filtered points to decrease the file size.